【论文】基于空间机械臂的微重力平台可达相对运动
相比地基微重力平台(如落塔、抛物线飞行等),天基微重力平台具有可实现长期微重力环境的优势。现有天基微重力平台主要有空间站、无拖曳卫星等。基于空间站的微重力平台运动受到舱内空间的约束;无拖曳卫星成本高昂且任务单一。
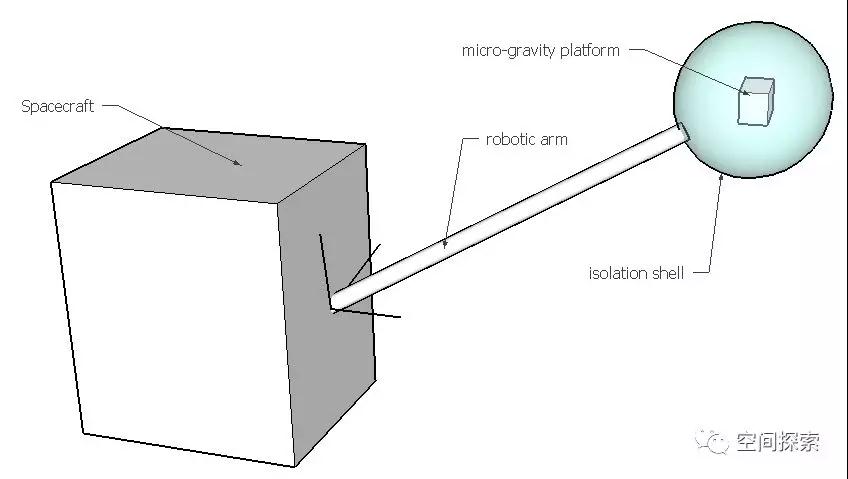
论文提出空间机器人驱动的微重力平台概念。系统由飞行器本体、机械臂、球壳式末端效应器(扰动隔离舱)以及在隔离舱内的微重力实验台。在实验状态下,实验台不受外力自由飞行,系统通过机械臂驱动隔离舱跟随实验台,飞行器本体通过姿轨控系统补偿驱动机械臂引起的反作用力。以此在保持飞行器既有飞行状态不变的情况下获得较长时间的微重力环境,飞行器本体可同时执行其它空间任务。
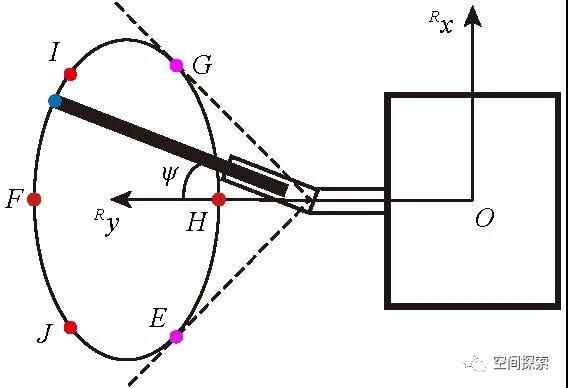
就此概念,论文对相对运动与空间机器人工作空间的关系、如何设计机器人可达的相对运动等问题进行了探讨。此文首次将空间相对运动与空间机器人的工作空间联系起来,这种联系是空间智能机器人集群与操控技术发展的必然趋势。
论文于2018年8月由Journal of Spacecraft and Rockets在线发布。
全文链接地址:https://arc.aiaa.org/doi/10.2514/1.A34086
附件下载:

 010-82178817
010-82178817 所长信箱:csu@csu.ac.cn
所长信箱:csu@csu.ac.cn 纪检信箱:jijian@csu.ac.cn举报电话:010-82178815
纪检信箱:jijian@csu.ac.cn举报电话:010-82178815 010-82581990
010-82581990 北京市海淀区邓庄南路9号 (邮编:100094)
北京市海淀区邓庄南路9号 (邮编:100094)
